Für dieses Projekt verwende ich weiterhin die SimTools 2.5. Mit dieser Version habe ich mich bereits früher im Zusammenhang mit dem Thema Motion Rig beschäftigt, und genau darauf baut auch dieses Setup auf.
Auch wenn inzwischen Version 3 verfügbar ist, wurden alle hier gezeigten Einstellungen und Tests mit Version 2.5 durchgeführt und erfolgreich verifiziert. Die Angaben beziehen sich bewusst auf diesen getesteten Stand. Wer eine neuere Version nutzt, sollte die Einstellungen entsprechend prüfen.
Für erste Bewegungsversuche eignet sich Live for Speed (LFS) sehr gut. Die Simulation ist schnell eingerichtet, läuft stabil und erlaubt unkomplizierte Tests. Download unter: https://www.lfs.net/
Zur Ansteuerung kommt SimTools zum Einsatz.
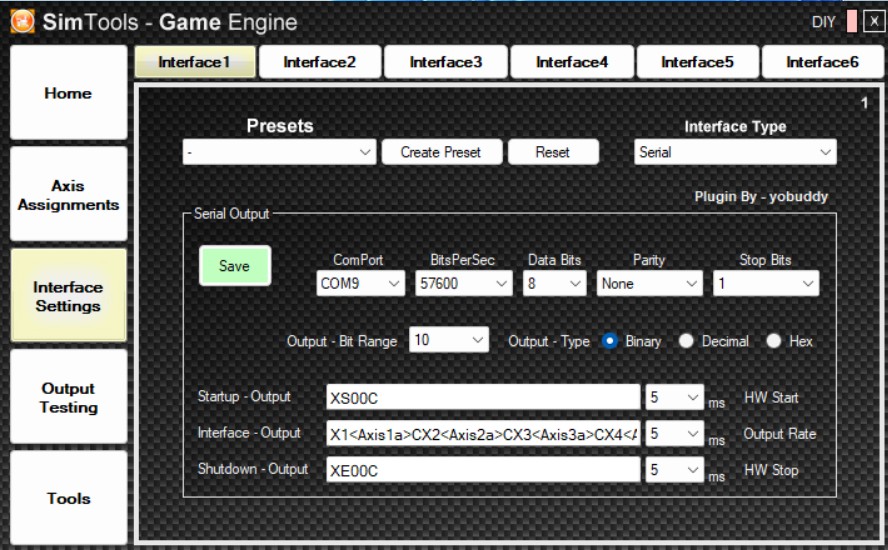
SimTools – Interface Settings
Interface Type: Serial
ComPort: Com-Port des Arduino aus der Arduino-IDE übernehmen
BitsPerSec: 57600
Data Bits: 8
Parity: None
Stop Bits:1
Output Bit Range: 10
Output Type. Binary
Start Output: XS00C
Interface Output: X1<Axis1a>CX2<Axis2a>CX3<Axis3a>CX4<Axis4a>CX5<Axis5a>CX6<Axis6a>C
Shutdown Output: XE00C
Die Zuordnung der Achsen zu den entsprechenden Arduino-Eingängen ist im Schaltplan dokumentiert. Dort sind die Verbindungen dargestellt.
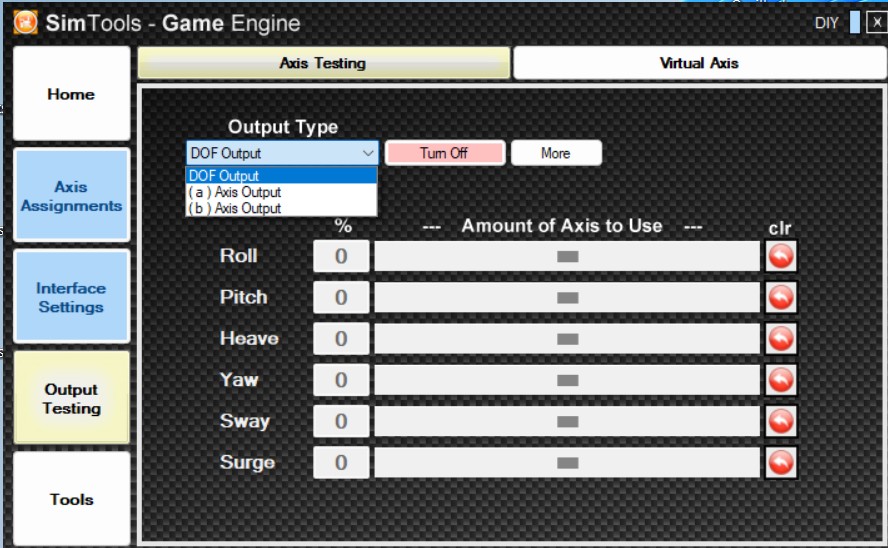
Wenn die serielle Schnittstelle wie oben konfiguriert ist, sollten sich im Bereich Output Test die Achsen bereits bewegen lassen.
Dazu von DOF Output auf Axis(a) Output umschalten
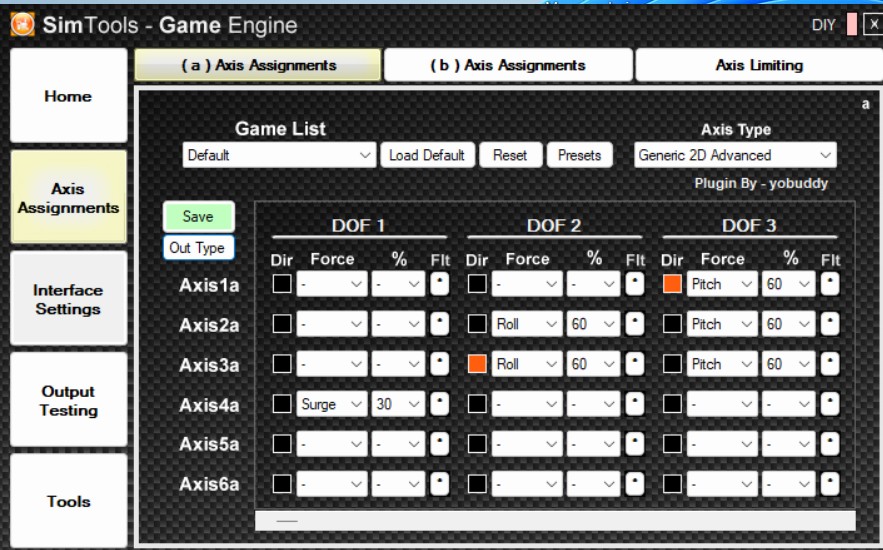
Die gezeigte Achsenkonfiguration ist die von mir verwendete und getestete Ausgangsbasis. Sie dient hier als nachvollziehbare Referenz für den dokumentierten Aufbau.