The current state of the motion rig project is still clearly in the design phase, but recent iterations have led to a fundamental insight: the previous approach to the axis drives has been completely discarded and is now being rethought from the ground up.
The focus is no longer solely on mechanical implementation, but specifically on the dynamic behavior of the axes. The goal is to achieve motion characteristics in the mockup that are as close as possible to the later full-scale, human-carrying version. In practical terms, this means high travel speeds, short response times, and a direct, responsive system behavior.
A key decision is the clear separation between mechanics and function. The mockup is not intended as a simplified model, but as a functional platform for electronics and control systems. The objective is to develop and test around 90% of the final electronics — including sensors, signal processing, and control logic — already at this stage. Ideally, scaling up to the full-size version will then only require adjustments to motor power, power supply, and mechanical dimensions.
To maintain maximum flexibility, the system is designed to be modular. The mockup is intended to support configurations as a 2-, 3-, 4-, or 6-axis system, allowing it to be expanded as needed. This not only creates an adaptable test platform but also provides a solid foundation for exploring different motion concepts.
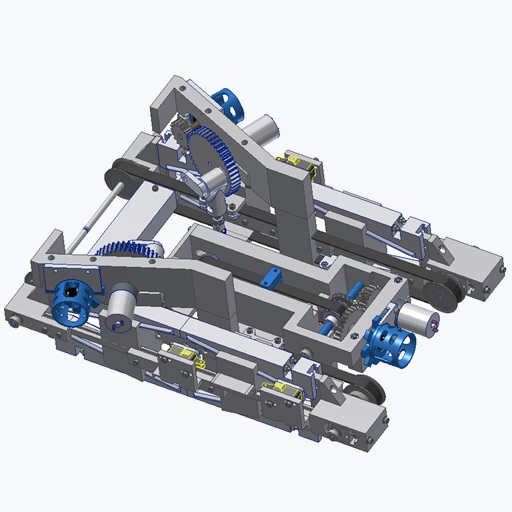
A key technical aspect is the reduction of moving mass. In dynamic systems, the lower the mass that needs to be accelerated, the better the achievable performance. For this reason, the drive system is designed so that as many components as possible remain stationary, while only the necessary structure is in motion. At the same time, the kinematics are defined to create a clear relationship between rotational and linear movement — in the current concept, one full rotation of the drive corresponds exactly to 100 mm of travel. This makes the system not only easier to understand, but also significantly easier to test and control.
The choice of Hall sensors for position feedback follows the same principle. They provide a simple, robust, and directly usable method of position detection, which can be transferred to the later full-scale version without significant additional complexity.
In summary, this is not a traditional model, but rather a scalable development tool that allows behavior, control systems, and overall architecture to be thoroughly tested before moving on to the full-scale build.