Der aktuelle Stand des Motion-Rig-Projekts ist weiterhin klar im Konstruktionsstadium, allerdings hat sich in den letzten Iterationen eine grundlegende Erkenntnis ergeben: Der bisherige Ansatz für die Achsantriebe wurde vollständig verworfen und wird aktuell neu gedacht und aufgebaut.
Der Fokus liegt dabei nicht mehr nur auf der mechanischen Umsetzung, sondern gezielt auf dem Bewegungsverhalten der Achsen. Ziel ist es, bereits im Mockup eine Dynamik zu erreichen, die sich möglichst nah an der späteren manntragenden Version orientiert. Das bedeutet konkret: hohe Verfahrgeschwindigkeiten, kurze Reaktionszeiten und ein möglichst direktes Ansprechverhalten.
Eine zentrale Entscheidung dabei ist die klare Trennung zwischen Mechanik und Funktion. Das Mockup dient nicht als vereinfachtes Modell, sondern als Funktionsplattform für die Elektronik und Regelungstechnik. Ziel ist es, etwa 90 % der späteren Elektronik – inklusive Sensorik, Signalverarbeitung und Steuerlogik – bereits hier vollständig aufzubauen und zu testen. Die spätere Skalierung in die manntragende Version soll sich im Idealfall nur noch auf Motorleistung, Spannungsversorgung und mechanische Dimensionen beschränken.
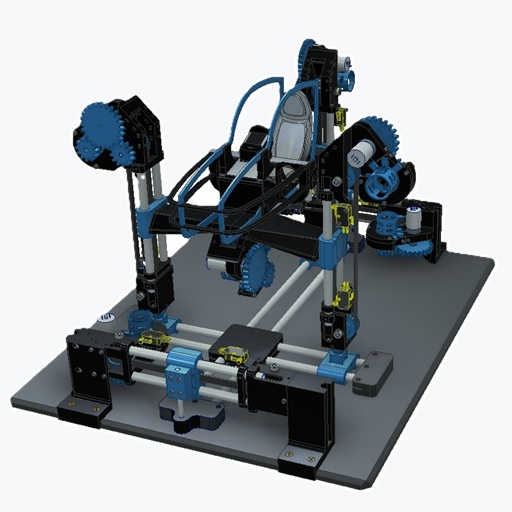
Um maximale Flexibilität zu erreichen, wird das System modular ausgelegt. Das Mockup soll so konstruiert werden, dass es sich je nach Bedarf als 2-, 3-, 4- oder 6-Achs-System aufbauen und erweitern lässt. Dadurch entsteht nicht nur ein anpassbares Testsystem, sondern auch eine solide Basis für unterschiedliche Motion-Konzepte.
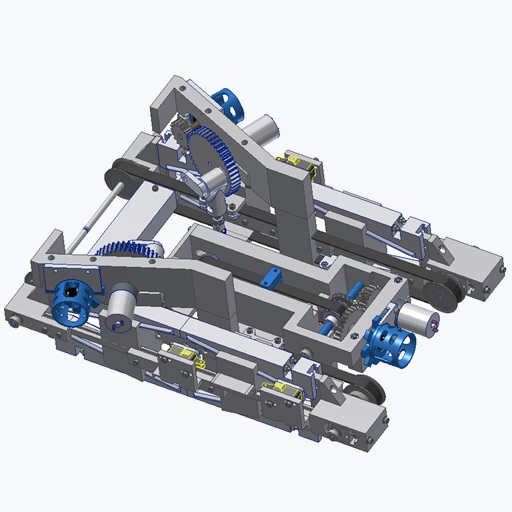
Ein wesentlicher technischer Punkt ist die Reduktion der bewegten Masse. Für dynamische Systeme gilt: Je geringer die zu beschleunigende Masse, desto besser das erreichbare Verhalten. Deshalb wird der Antrieb so ausgelegt, dass möglichst viele Komponenten stationär bleiben und nur die notwendige Struktur bewegt wird. Gleichzeitig wird die Kinematik so gewählt, dass ein klarer Zusammenhang zwischen Drehbewegung und Linearbewegung entsteht – im aktuellen Konzept entspricht eine vollständige Umdrehung des Antriebs exakt 100 mm Verfahrweg. Das macht das System nicht nur einfacher zu verstehen, sondern auch deutlich leichter zu testen und zu regeln.
Auch die Entscheidung für Hall-Sensoren als Positionsrückmeldung basiert auf diesem Ansatz. Sie ermöglichen eine einfache, robuste und direkt auswertbare Positionsbestimmung, die sich ohne großen Mehraufwand auf die spätere Version übertragen lässt.
Zusammengefasst entsteht hier kein klassisches Modell, sondern eher ein skalierbares Entwicklungswerkzeug, mit dem sich Verhalten, Steuerung und Gesamtaufbau sauber durchtesten lassen, bevor es in die große Version geht.