The design phase of the MidiMotionRig has finally been completed.
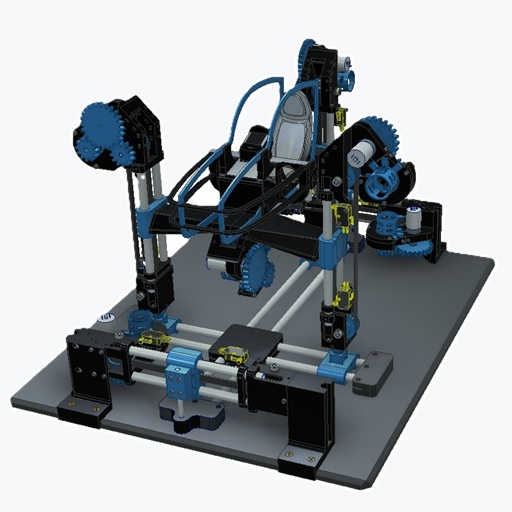
After many hours of CAD work, the project now enters the actual construction phase of a mechanical puzzle consisting of a total of 874 individual parts.
The project will be built and documented step by step — starting with the base linear axis, followed by the 2DOF, 3DOF, and 4DOF versions, all the way to the final 6DOF configuration.
Just like the NanoMotionRig, the MidiMotionRig follows a consistently modular design approach.
This makes it possible to develop, test, and expand the mechanics, electronics, and software gradually over time.
But why build a MidiMotionRig in the first place?
While the NanoMotionRig was primarily intended as a simple introduction to motion platforms, the MidiMotionRig pursues a much larger goal:
the development and optimization of a complete motion-control platform at a compact scale.
The system makes it possible to test and further develop electronics, sensor systems, and Arduino software on a complete 6-axis setup — without immediately having to build the large and expensive mechanical components required for the later full-scale, human-carrying version. Changes in control behavior or software can therefore be observed and evaluated directly.
During the design process, particular attention was also given to achieving axis dynamics and speed characteristics that behave as closely as possible to the later FullMotionRig version. Many electronic components, such as the Arduino Mega 2560, Hall sensors, limit switches, and safety systems, can later be transferred almost one-to-one into the larger system.
The goal of the MidiMotionRig project is therefore not only to create another fully functional desk-sized motion platform, but also to establish the hardware and software foundation for the later full-scale FullMotionRig.
At the same time, the project is intended to make the topic more accessible for others. Electronics, sensor systems, and motion control can be explored and tested in a practical way without immediately investing large amounts of money into oversized mechanical components.
With the start of the MidiMotionRig, this marks not only the beginning of a new motion project, but also the foundation for the next development stage of the future FullMotionRig.