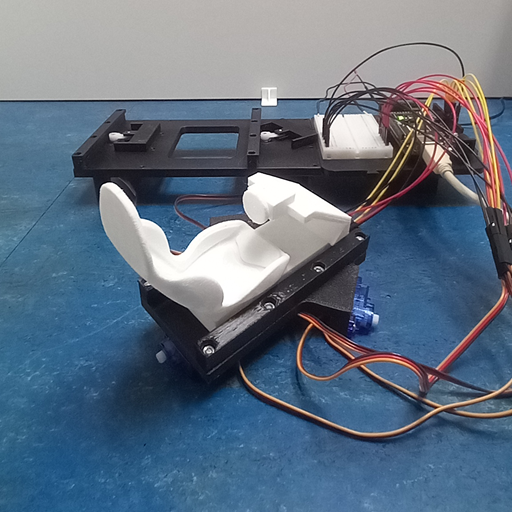
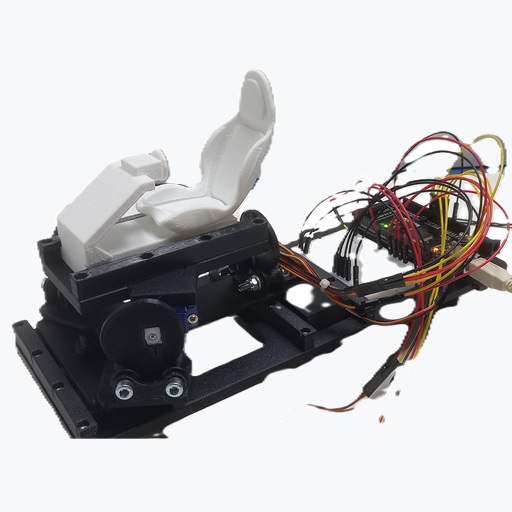
Mechanischer Aufbau
Grundprinzip
Die Konstruktion basiert nahezu vollständig auf 3D-gedruckten Bauteilen aus PLA. Nur wenige Normteile aus dem Baumarkt werden zusätzlich benötigt. Dadurch bleibt das Projekt auch mit einem einfachen Einsteiger-3D-Drucker realisierbar. Je nach Druckqualität kann es erforderlich sein, einzelne Passungen leicht nachzuarbeiten. Optional kann Sekundenkleber zur Sicherung bestimmter Bauteile eingesetzt werden
Passende Komponenten für das Workshopboard
Wenn du das Workshopboard ohne langes Suchen nachbauen möchtest, findest du hier die zentralen Komponenten, die ich im Aufbau genau so verwendet habe.
Die vollständige Stückliste mit Maßen, Mengen und Normteilensteht zusätzlich als PDF zur Verfügung
Affiliate-Link: Als Amazon-Partner verdiene ich an qualifizierten Verkäufen.
Werkzeugliste
- Innensechskantschlüssel SW 2,5 und SW 4
- Gabelschlüssel SW 8
- kleiner Kreuzschlitzschraubendreher
- Seitenschneider (für feine Schnitte)
- Multitool (z.B. Dremel oder Proxxon)
- ø1,8mm HSS-Bohrer
- gg. Flachfeile (Schlicht)
- 3D-Drucker
Die Werkzeugauswahl wurde bewusst so gewählt, dass sie in einer typischen Hobbywerkstatt vorhanden ist.
Schritt für Schritt Anleitung
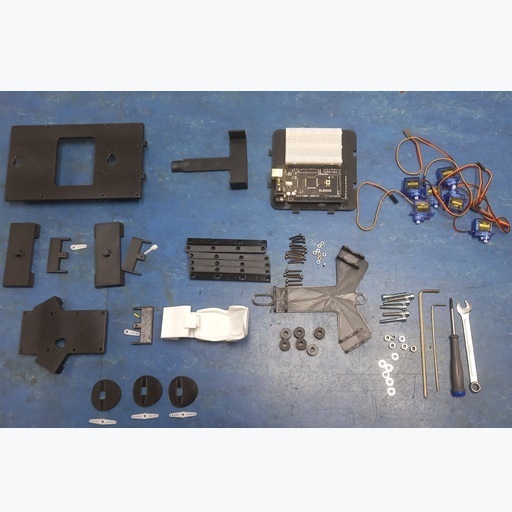
Alle Teile aus der Stückliste müssen für die Montage des 6-Achssystems vollständig vorhanden sein und bereitliegen.
1.)
Die Rollen GS-00-13 mit den M5 × 25 Schrauben, Unterlegscheiben und Stopmuttern an der Grundplatte GS-00-14 montieren.
Die Stopmuttern so anziehen, dass die Rollen spielfrei sitzen, sich aber frei drehen lassen.


2.)
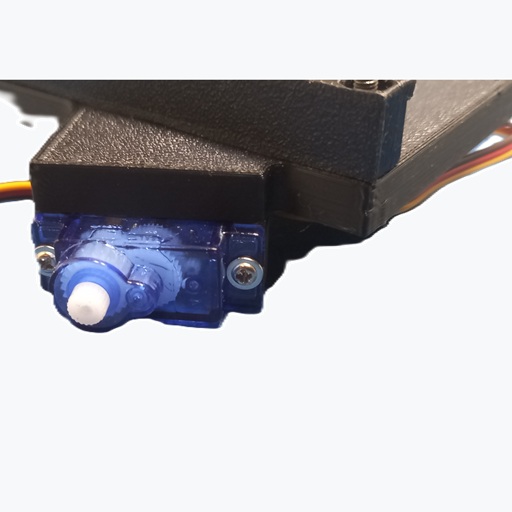
Grundplatte GS-00-05 nehmen und den Servo für die Vorwärts-/Rückwärtsbewegung (Surge) mittig montieren.
Noch kein Ruderhorn befestigen.
Die beiden Befestigungsbohrungen für den Servo gegebenenfalls mit einem Ø1,8 mm Bohrer vor dem Einschrauben der mitgelieferten Schrauben leicht nacharbeiten. Dies gilt ebenfalls für alle folgenden Servos.
Noch keine Ruderhörner befestigen.
3.)
Die Servos für Achse 2–4 ebenfalls befestigen.
Hier auf die korrekte Ausrichtung achten.

4.)
Grundplatte GS-00-17 nehmen und die beiden Servos für die Seitwärtsbewegung (Sway) und Yaw montieren.
Auch hier noch keine Ruderhörner befestigen.

5.)
Als nächstes die Leisten GS-00-06 jeweils mit 4 Stück M3 Muttern bestücken.
Muttern sauber einsetzen und bündig ausrichten.

6.)
Eine der Leisten GS-00-06, auf der Seite des Servos, mit der Grundplatte GS-00-05 verschrauben.

7.)
Zwei weitere Leisten GS-00-06 mit der Grundplatte GS-00-17, ebenfalls auf der Seite der Servos, verschrauben.

8.)
Stütze GS-00-20 in die Grundplatte GS-00-17 einsetzen.
Bei Bedarf mit etwas Sekundenkleber fixieren.
9.)
Workshopboard platzieren und die Servos 1 und 6 anschließen.

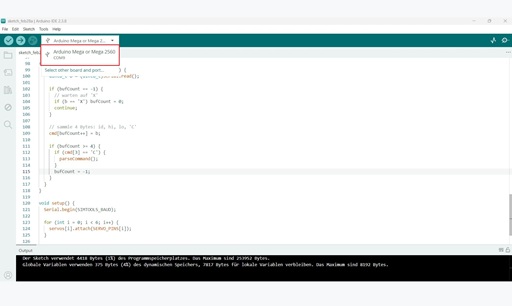
10.)
Die Arduino IDE öffnen, Arduino verbinden und einen neuen Sketch erstellen.
Den Vorlage-Sketch hineinkopieren, anschließend verifizieren und kompilieren.
11.)
Verbindung mit SimTools unter der Registerkarte Interface Settings herstellen.

Folgende Einstellungen sind notwendig:
Interface Type: Serial
ComPort: COM-Port des Arduino aus der Arduino-IDE übernehmen
BitsPerSec: 57600
Data Bits: 8
Parity: None
Stop Bits: 1
Output Bit Range: 10
Output Type: Binary
Start Output: XS00C
Interface Output: X1<Axis1a>CX2<Axis2a>CX3<Axis3a>CX4<Axis4a>CX5<Axis5a>CX6<Axis6a>C
Shutdown Output: XE00C
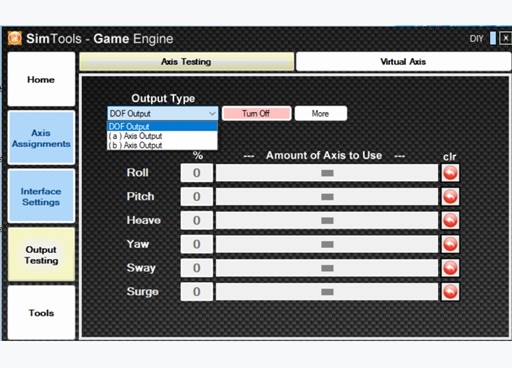
12.)
Wenn alles eingestellt ist, kann der Achsentest erfolgen.
Dazu in der Testumgebung auf AxisA umschalten, um die einzelnen Ausgänge direkt anzusteuern.
Am Schluss alle Servos in die Center-Position fahren.
13.)
Die Kurvenscheiben mit dem Pfeil nach unten an die entsprechenden drei Servos an der Platte GS-00-05 montieren.
14.)
Die drei Schieber GS-00-04 mit einem kurzen Ruderhorn (Gesamtlänge 22 mm) verbinden.

Hierzu muss das zweite Loch mit einer kleinen Rundfeile, einem Ø1,8 mm Bohrer oder einem Multitool so weit geöffnet werden, dass ein Stück Ø1,75 mm Filament leichtgängig durchpasst.
Die Bohrungen im Schieber gegebenenfalls ebenfalls anpassen.
Das Filament sollte straff sitzen, jedoch ohne Gewalt eingesetzt werden können.
Nun das Ruderhorn zusammen mit dem Schieber am Servo montieren und überstehendes Filament bündig abschneiden.

15.)
Die vorbereiteten Schieber jetzt in der Mittelstellung an den vormontierten Platten GS-00-05 und GS-00-17 montieren.
16.)
Den Sitz von der Seite über den Schieber auf Platte GS-00-05 schieben.

Danach die fehlende Leiste mit 4 Stück M3×12 festschrauben.
Der Sitz sollte leicht wackeln und auf keinen Fall stramm auf dem Schieber oder zwischen den Leisten sitzen.
Ist das der Fall, ist die erste Achse fertig.
Hinweis:
Sollten nur 3 Achsen gebaut werden, kann der Sitz mit etwas Papier unterlegt und mit den seitlichen Leisten festgeklemmt werden.
17.)
Die 36 mm langen Ruderhörner in die Kurvenscheiben GS-00-21 einrasten.
Bei passender Toleranz gehen sie mit leichtem Druck hinein und sitzen anschließend fest.
Die Ruderhörner können zusätzlich mit 1–2 Tropfen Sekundenkleber gesichert werden.
Die Daten für die Kurvenscheiben liegen ebenfalls im STEP-Format vor, falls diese an anders geformte Ruderhörner angepasst werden müssen.

18.)
Arbeitsschritt 16 mit den Schiebern GS-00-18 auf Platte GS-00-17 wiederholen und ebenfalls die beiden fehlenden Leisten montieren.
19.)
Die vorbereitete Platte GS-00-14 auf die fertige Platte GS-00-17 aufstellen.
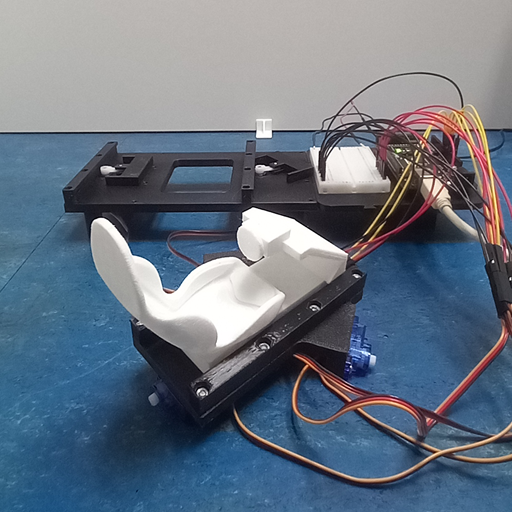
20.)
Hochzeit:
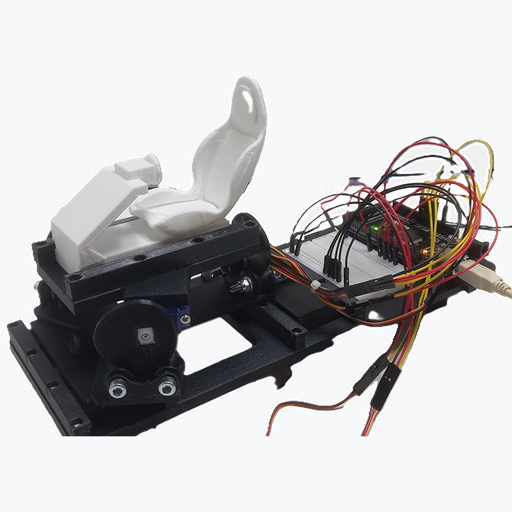
Die vormontierten Achsen 1–4 auf die Rollen stellen.
Das Nano Motion Rig ist fertig

Hinweis:
Das System kann auch als 3-Achsen- oder 4-Achsen-System aufgebaut werden.
Für 4 Achsen den Aufbau auf Platte GS-00-17 weglassen.
Für 3 Achsen zusätzlich die Funktion Surge (Sitz bewegt sich vorwärts/rückwärts) entsprechend der Beschreibung weglassen.
Weitere Daten:
Zeichnung

PDF-Stückliste